Innovation in Action
Discover how we're using technology to protect our environment

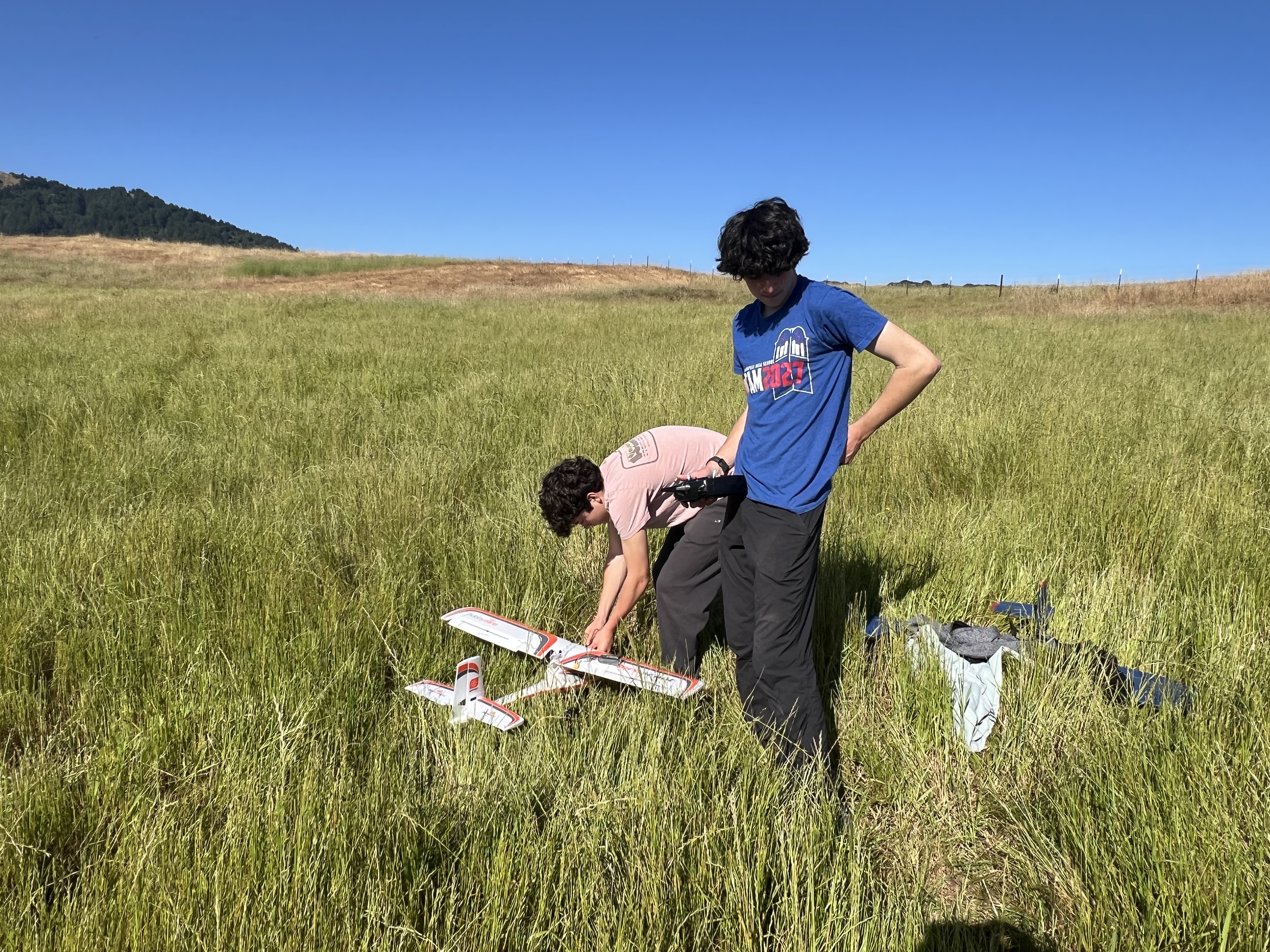
3D Printed UAV
Our flagship project involves designing and manufacturing affordable unmanned aerial vehicles using 3D printing technology. These drones are equipped with high-resolution cameras for environmental monitoring.
- Custom-designed airframes for optimal flight performance
- Camera systems for aerial photography and mapping
- Extended flight time for comprehensive surveys
- Cost-effective manufacturing process

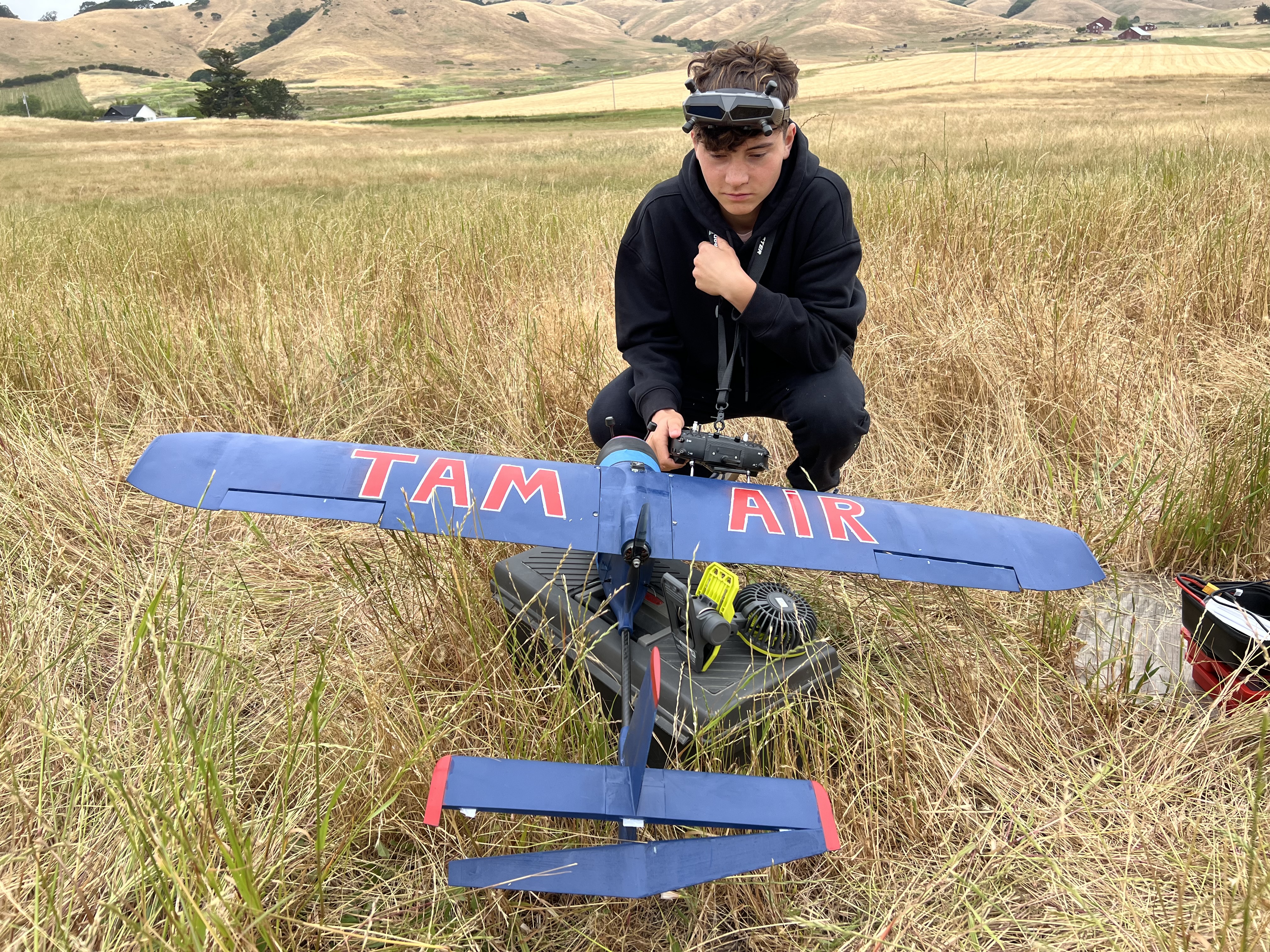
FPV Drone Operations
First-person view drones allow our pilots to navigate through challenging terrain with precision. These agile aircraft are perfect for detailed inspections and search operations.
- Real-time video transmission
- Highly maneuverable for tight spaces
- HD recording capabilities
- VR headset integration for immersive control